anti windup gain
Systems that are subject to both time-delay in state and input saturation are considered. Note Theorem 2 is also applicable to obtain the static anti-windup gain E a in this case.
20 Sim Webhelp Library Signal Control Pid Control Anti Windup
Anti-windup techniques Anti-windup schemes.

. Anti-reset windup ARW protection is a standard feature of industrial PID controllers. Kp is the proportional gain coefficient. If B cp and D cp are known Theorem 3 can also be applied to obtain the static anti-windup gain E a.
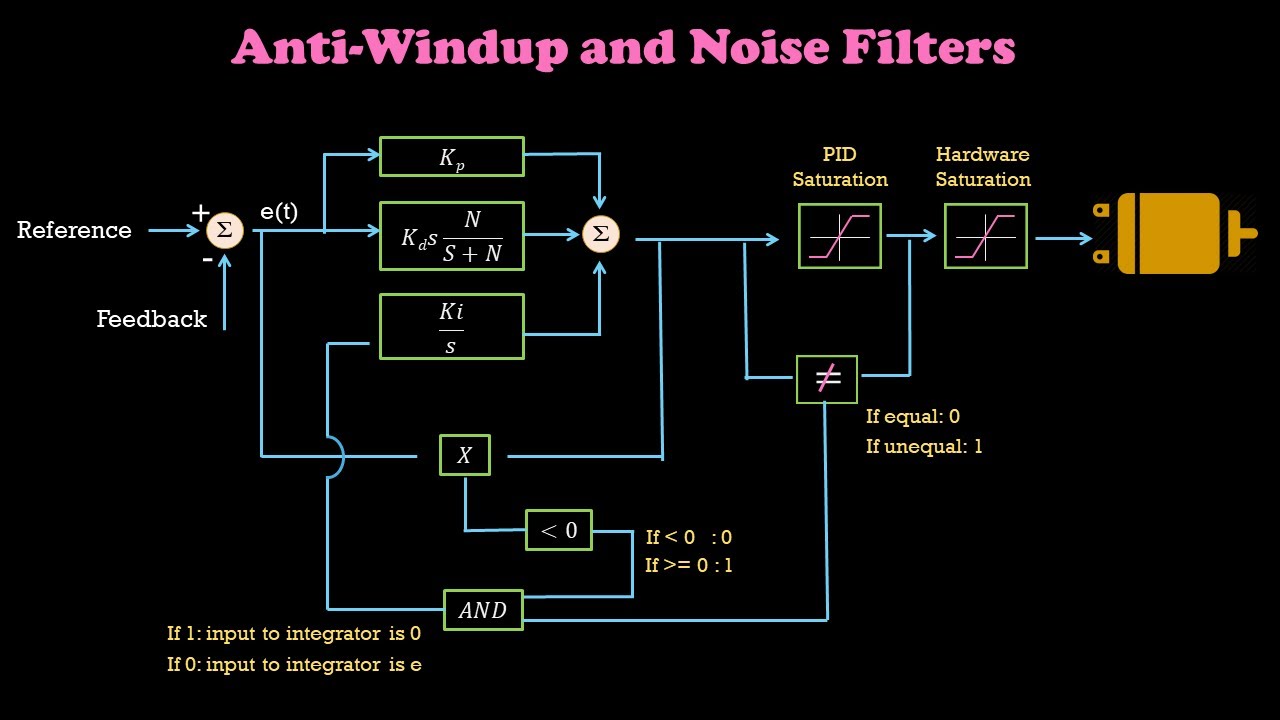
U k sat K p e k sat K i T s z z 1 e k A B A B s a t x A B min max x A B where. While we normally think of the ARW limits being. When the actuator saturates the anti-windup scheme will be activated and prevent the controller output from wandering away.
Ki is the integral gain coefficient. Actuator saturation integrator wind-up phenomenon discussed in detail in 6 1. Ad hoc methods Anti-windup 3.
The proposed method is based on the uncertain gain scheduling plant model and Bellman Lyapunov equation. Ts is the sampling period. However computational burden will be decreased by Theorem 3 considering the dimensions of.
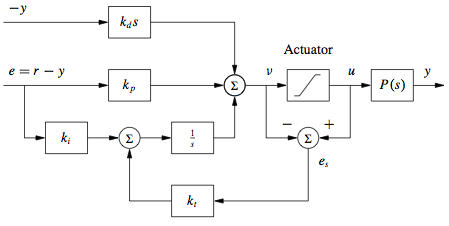
E is the error signal. A is the lower limit for saturation. Integral windup also known as integrator windup or reset windup refers to the situation in a PID feedback controller where a large change in setpoint occurs say a positive change and the integral term accumulates a significant error during the rise windup thus overshooting and continuing to increase as this accumulated error is unwound offset by errors in the other.
In effect the anti-windup scheme matches the controller output and actuator output. The anti-windup gain is synthesized to enlarge the estimation of domain of attraction while guaran- teeing the stability of the closed-loop system and an optimization algorithm in the form of LMIs is constructed to compute the compensator gain which maximizes the estimation. Conditional integration The PID control law is utKpbrt ytIt KpTd dyt dt Kpbrt KpyptIt where yptytTd dyt dt is the prediction of the output for time tTd Consider the proportional band yltyhtfor yptin which the corresponding u is not saturating.
The LMI conditions are derived based on a chosen Lyapunov function to ensure the stability of its closed loop system and an L 2-gain performance. The integral gain is the only one of the three factors which uses an accumulating summation so past feedback values can influence future output solutions. Control systems often rely on precise system feedback about positions speeds and temperatures in order to provide better output control.
Where K_nu rho is the parameter-dependent gain for anti-windup compensator. Integral Anti-Windup for PI Controllers Fig. The purpose of this paper is to study the use of anti-windup gains for obtaining larger regions of stability for linear systems with saturating inputs.
We just need to substitute matrices and for matrices F and G. The objective of this paper is to design a gain-scheduled anti-windup PID controller such that the effect of actuator saturation can be minimized and the system is stable with the mathcal L _2-gain bounded. To regulate the damper controller gains are designed with the feedback loop to attain robustness.
What is meant by reset windup. Considering that a linear dynamic output feedback has been designed to stabilize the linear system without saturation a method is proposed for designing an anti-windup gain that maximizes the estimation of the basin of. U is the control signal.
ARW default values may not match up with output limits as output scale and engineering units change. This technical note revisits the problem of designing a static anti-windup gain for enlarging the domain of attraction of the resulting closed-loop system by utilizing a composite quadratic Lyapunov function and an existing LMI based design algorithm is enhanced to result in a nonlinear possibly continuous anti-Windup gain. In some DCS ARW limits are adjustable besides output limits.
The static anti-windup compensator is in fact a nonlinear algebraic loop and its implementation needs to be robust to delay. Linear PI controller Fig. HttppaypalmeBrainGainEdu Support us on Patreon.
Integral or Reset Windup. The designed robust controller ensures parameter dependent quadratic stability and in the. It is achieved by adopting differences in the actual and estimated models considering the effect of the external disturbance process noise and measured noise along with the Kalman observer.
The ARW limits may not be at their best values. This is why the actuator output is also known as the tracking signal TR.

Discrete Time Pi Controller With External Anti Windup Input Simulink Mathworks Espana

Basic Scheme For Anti Windup In A Pid Controller Download Scientific Diagram
20 Sim Webhelp Library Signal Control Pid Control Anti Windup

Back Calculation Anti Windup Pid Controller Download Scientific Diagram
Anti Windup For Integrator And Noise Filter For Differentiator Part6 Control Systems Simplified Youtube

Pi Controller With Back Calculation Anti Windup Scheme Download Scientific Diagram
Pi Controller Structure With Anti Windup Correction Term Download Scientific Diagram
Pid Control Fbswiki
Pid Anti Windup Schemes Esi Group

Back Calculation Algorithm The Back Calculation Anti Windup Method Download Scientific Diagram

Discrete Time Pi Control With Integral Anti Windup Simulink Mathworks Espana

Matlab Simulink Pid Controller Difference Between Back Calculation And Clamping For Anti Windup Itecnote

Figure 5 From Anti Windup Schemes For Proportional Integral And Proportional Resonant Controller Semantic Scholar

Block Diagram Of The Back Calculation Anti Windup Scheme Download Scientific Diagram
Pid Anti Windup Schemes Esi Group

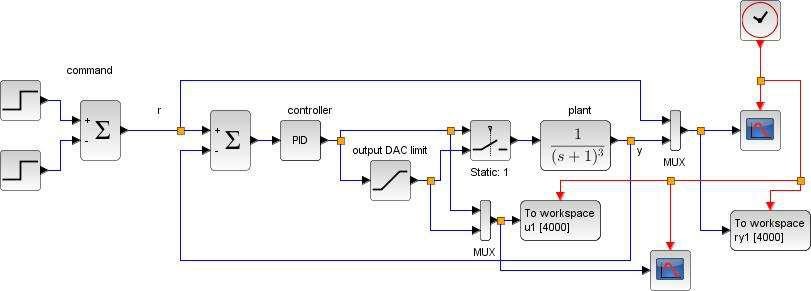
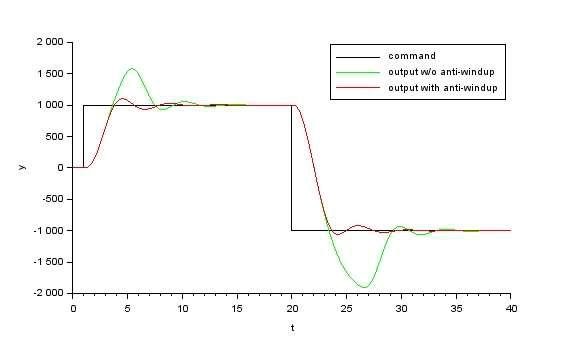
Anti Windup Control Using A Pid Controller Matlab Simulink Mathworks Switzerland

Does Anyone Have A Suggestion Of An Anti Wind Up To This Problem

3 Block Diagram Of The Pi Controller With Back Calculation Anti Windup Download Scientific Diagram

Figure 3 From Anti Windup Pid Controller With Integral State Predictor For Variable Speed Motor Drives Semantic Scholar



Comments
Post a Comment